La recolección de residuos del futuro
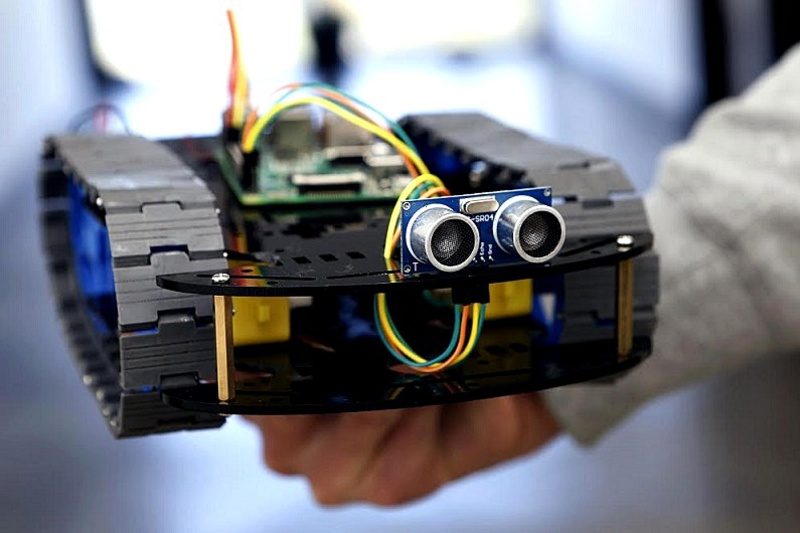
Cuatro alumnos de la Facultad de Informática de la Universidad Nacional de La Plata (UNLP) desarrollaron un robot recolector de residuos, que puede moverse por un recorrido predeterminado con puntos específicos para juntar residuos.
Gracias al uso de sensores, el robot obtiene información del ambiente, realiza cálculos y cuenta con una retroalimentación para hacer acciones y movimientos en una u otra dirección.
El encargado del grupo de investigación, Santiago Medina describió que si bien el prototipo actualmente se controla desde una computadora, podría manejarse también desde un celular.
“La idea es que el robot tenga un recorrido con diferentes ‘paradas’ en las que debe hacer la acción de recoger las bolsas”, describió el investigador, y explicó que “los chicos armaron un motor que levanta una barrita mecánica”.
Apuntó que “el prototipo frena en un lugar determinado; esa palanca baja, aprieta y vuelve a subir, depositando la bolsa encima suyo”, y adelantó que en un futuro, si la iniciativa se desarrollase a nivel industrial, el robot podría tener un contenedor en el que se arrojasen los residuos.
“Con el debido desarrollo, se puede aplicar a un ambiente real. Nosotros ahora trabajamos a pequeña escala y en una maqueta. Puede ser un robot que vaya corriendo las ramas de la calle o juntando basura”, aseveró Medina.
La idea de construir el robot nació de un problema real, contó Emanuel Heredia, uno de los alumnos que llevan adelante el proyecto.
“La idea surgió en base al pensamiento de que vaciar los cestos de basura, por ejemplo de la Facultad, es una tarea muy tediosa para el personal de limpieza, ya que es una labor repetitiva”, dijo.
“Además, como los cestos siempre se suelen encontrar en los mismos lugares, se nos ocurrió buscar automatizar la tarea de recolección y vaciado. Por eso, pensamos en un robot recolector que, a la vez, siga un circuito ya preestablecido y, al momento de toparse con el cesto, ya tenga una tarea programada”, detalló.
El joven sostuvo que “este es un ejemplo, pero también se podría llevar la idea a una fábrica y automatizar todo lo que sea carga y descarga de material o transportar partes o materiales de un punto a otro manteniendo fijo origen y destino”.
El trabajo se enmarca en la iniciativa “Proyecto de Innovación con Alumnos”, una iniciativa que busca que alumnos de diferentes años de la carrera participen de propuestas vinculadas a las áreas informáticas.
Fuente: Telam